Objetivo: Desarrollar y comprender la matriz de transición de estado, mediante MATLAB, verificando el desarrollo previo en clase y graficar los resultados obtenidos para su análisis.
Representación matricial de las ecuaciones de estado
Las ecuaciones n de estado de un sistema dinámico de n-ésimo orden se representa como:
![]()
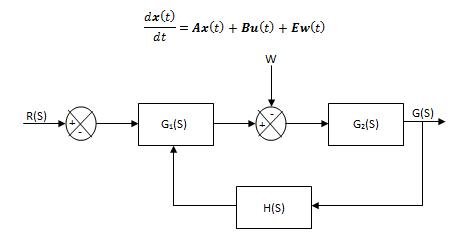
en donde i=1,2,….,. La i-ésima variable de estado se representa por x_i (t);r_j (t) denota la j-ésima entrada para j=1,2,…,p; y w_k (t) denota la k-ésima entrada de perturbación, con k=1,2,…,v.
Sean las variables y_1 (t), y y_2 (t),…y_p (t) las q variables de salida del sistema. En general, las variables de salida son funciones de las variables de estado y de las varibles de entrada. Las ecuaciones de salida se puede expresar como:
![]()
en donde j=1,2,…,q.
La matriz de transición de estado se define como una matriz que satisface la ecuación de estado lineal homogénea:
La ecuación de transición de estado se define como la solución de una ecuación de estado homogénea. La ecuación de estado lineal invariante con el tiempo.
Desarrollo
1. Dada siguiente la ecuación de estado:
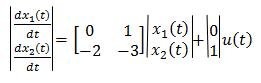
Para poder determinar la matriz de transición de estado ?(t) y el vector de estado x(t), establecemos parámetros: para t?0 en donde la entrada es u(t)=1 para t?0. Los coeficientes de las matrices se identifican como A=matriz del sistema, B=matriz identidad y E= esta matriz en nuestro caso no existe, por lo tanto nos resultan como:
![]()
siendo:
![]()
Por lo tanto al resolver tenemos que:
![]()
Una vez obtenido el resultado de las operaciones para sI-A, obtenemos su matriz inversa:
![]()
La matriz de transición de de estado de A se encuentra tomando la transformada inversa de Laplace de la inversa de la matriz obtenida anteriormente, por lo que:
![]()
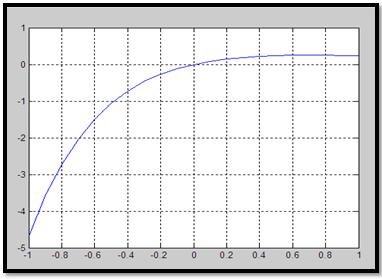
Una vez obtenida la matriz de transición de estado de A. Proseguimos con el graficad de estas mediante MATLAB. En la Figura. 1 se muestra la respuesta del primer estado del sistema y seguidamente se presenta el código desarrollado.
Para la ecuación ![]() vemos la respuesta en la fig. 1.
vemos la respuesta en la fig. 1.
t=-1:0.1:1; y=2*exp(-1*t)-exp(-2*t); plot(t,y) grid

Para la segunda ecuación ![]() tenemos el resultado en la fig. 2.
tenemos el resultado en la fig. 2.
t=-1:0.1:1; y=exp(-1*t)-exp(-2*t); plot(t,y) grid
Para la ecuación ![]() tenemos la respuesta en la fig. 3.
tenemos la respuesta en la fig. 3.
t=-1:0.1:1;
y=-2*exp(-t)+2*exp(-2*t);
plot(t,y)
grid
plot(y,t)
grid
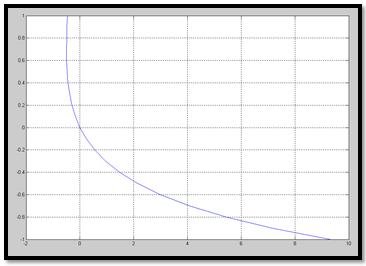
Para la ecuación ![]() tenemos la respuesta en la fig. 4.
tenemos la respuesta en la fig. 4.
t=-1:0.1:1;
y=-exp(-t)+exp(-2*t);
plot(y,t)
grid

Conclusiones
En el desarrollo de esta practica podemos observar como es la respuesta que presenta cada una de las ecuaciones que comprenden a la ecuación de transición de estados, dando mayor facilidad a su análisis al poder graficas cada una de ellas y asi poder analizar cada una de las respuestas que presenta nuestra ecuación.
Mediante este análisis podemos ver en que momento entra al sistema una perturbación o algún disturbio, y para así poder desarrollar un compensador que elimine dicho disturbio o perturbación, pudiendo así hacer que nuestro sistema sea mas estable, con una mejor respuesta y con un mejor desempeño en la proceso en el cual se este aplicando.
Autor: David Ruiz